Multicopter Komponenten
Ein funktionierender und gut fliegender Multicopter setzt sich aus diversen, sorgfältig aufeinander abgestimmten Teilen zusammen. Diese Zusammenfassung verschafft Ihnen einen ersten Überblick über die benötigten Komponenten.
Frame (Rahmen)
Ein Frame hält alle Komponenten zusammen. Frames werden so entworfen, dass sie robust sind, aber auch leicht. Zudem sollte er Vibrationen, welche die Motoren im Betrieb abgeben, abdämpfen.
In der Vergangenheit bestanden frames häufig aus G-10 (Glasfaser), Aluminium oder Holz. Heutzutage wird fast ausschliesslich Carbonfaser verwendet. Carbonfaster zeichnet sich durch extreme Robustheit und Leichtigkeit aus.
Die einzelnen Teile eines Frames müssen nicht alle aus dem gleichen Material bestehen.
Brushless Motoren (Bürstenlose Motoren)
Durch ihre bürstenlose Konstruktion läuft der Motor ohne Schleifkontakt. Dies ermöglicht eine höhere Drehzahl sowie eine höhere Energieeffizienz. Der optimierte Wirkungsgrad eignet sich perfekt für Multicopter.
Brushless Motoren gibt es in diversen Ausführungen. Grösse, Gewicht und Propellerart haben einen direkten Einfluss auf den Stromverbrauch.
Ein oft verglichener Wert ist Kv - dieser gibt an, wie viel RPM (Umdrehungen pro Minute) der Motor pro Volt leisten kann. Daraus ergibt sich also:
RPM = Kv x U
Beispiel: Ein Motor mit 2300Kv macht bei einer Spannung von 11.1V 25'300 Umdrehungen pro Minute (2300 x 11.1).
Propeller
Auf jeden Motor kommt ein Propeller. Da jeweils zwei Motoren in Uhrzeigerrichtung und zwei in Gegenuhrzeigerrichtung drehen, müssen jeweils zwei Propeller nach rechts (Uhrzeiger), und zwei nach links (Gegenuhrzeiger) geneigt sein.
Propeller gibt es mit verschiedenem Durchmesser und Pitch (Neigung).
Tip: Die Propellergrösse wird durch die Framegrösse bestimmt. Hat man den Propeller bestimmt wählt man den passenden Motor.
Dazu sollte man folgendes beachten:
- Um so grösser der Durchmesser und Pitch, desto grösser der Auftrieb. Die Motoren brauchen mehr Leistung, können dafür allerdings mehr Gewicht tragen.
- Bei Motoren mit hohem RPM sollte man kleine oder mittlere Propeller verwenden.
Bei Motoren mit tiefen RPM sollte man grössere Propeller wählen, da es bei mittlerer oder kleiner Grösse zu Turbulenzen kommen kann und diese den Quad bei kleiner Geschwindigkeit nicht tragen mögen.
Möchte man also einen Quad zusammenbauen welcher stabil fliegt und mehr Gewicht tragen kann, um z.B. Aufnahmen mit grösserer Kamera zu machen, würde man einen Motor mit weniger Umdrehung wählen und stattdessen mit grösseren Propellern für mehr Auftrieb sorgen.
Für wendige Quads mit höherer Reaktionszeit eignen sich Motoren mit grösserem RPM und kleineren Propellern.
ESC
Brushless Motoren sind mehrphasig – normalerweise 3-Phasig – d.h. durch direktes Speisen von Gleichspannung drehen die Motoren noch nicht. Hier kommen die ESCs (Electronic Speed Controller) ins Spiel. Der ESC sendet eine Abfolge von Signalen an die Motoren, die diesen zum rotieren bringen.
Ein wichtiger Faktor für das Aussuchen eines ESC ist die Ampere Angabe. Empfohlen wird die Wahl eines ESCs welcher für mehr Ampere ausgelegt ist als es der Motor fordert. Ein anderer wichtiger Faktor kann die Programmierbarkeit des ESC sein, dies ist bei der Verwendung von empfindlichen Motoren nützlich.
Batterie
 Empfohlen werden LiPo Batterien (Lithium-Polymer). Diese sind leicht und erfüllen die erforderliche Strombelastung. Ebenfalls verwendbar sind NiMH Batterien (Nickel-Metallhydrid), diese weisen jedoch ein höheres Gewicht als LiPo-Batterien auf.
Empfohlen werden LiPo Batterien (Lithium-Polymer). Diese sind leicht und erfüllen die erforderliche Strombelastung. Ebenfalls verwendbar sind NiMH Batterien (Nickel-Metallhydrid), diese weisen jedoch ein höheres Gewicht als LiPo-Batterien auf.
LiPo's für den Modellbau gibt es als einfache Zelle (3.7V) oder bis zu 10 Zellen in Serie geschaltet (37V). Eine häufig verwendete LiPo Batterie für Quadcopter ist die 4SP1 Batterie. 4SP1 bedeutet, dass vier Zellen in Serie (Reihenschaltung) als eine Parallel verwendet werden. In diesem Falle liefert diese eine Spannung von 14.8V.
Bei der Auswahl der Batteriekapazität braucht es Berechnungen in folgenden Punkten:
- Wie viel Leistung brauchen die Motoren?
- Welche Flugzeit strebt man an?
- Wie viel Einfluss sollte das Gewicht der Batterie auf das Gesamtgewicht haben?
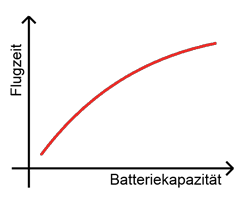
Generell gilt, umso höher die Kapazität, desto länger die Flugzeit. Da eine höhere Batteriekapazität jedoch auch höheres Gewicht bedeutet steigt die Flugzeit nicht Linear mit der Kapazität, sondern flacht bald wieder ab.
In diesem Falls sind Erfahrungswerte von Vorteil. Für den QAV250 z.B. bieten 1300mAh eine ideale Flugzeit und Fluggeschwindigkeit.
Ein weiterer wichtiger Faktor ist die Entladerate, die sogenannte C-Rate. Die C-Rate gibt zusammen mit der Kapazität der Batterie an, wie viel Strom von der Batterie gezogen werden kann.
Die Abkürzung „C“ steht für das Verhältnis von Ladestrom in Ampere geteilt durch die Zellkapazität in Amperestunden und ist damit umgekehrt proportional zur Ladedauer (A/Ah).
Der Maximalstrom der zur Verfügung steht wird wie folgt berechnet:
Maximalstrom = Entladerate x Kapazität
Beispiel: Eine 1300mAh Batterie mit 30C kann sich mit bis zu 1300mAh x 30C = 39A entladen.
In diesem Fall sollte man darauf achten, dass der Gesamtstromverbrauch der Motoren nicht mehr als 39A beträgt.
Wichtiger Hinweis! Vor dem Ersteinsatz sollten die Zellen/Batterien mit einem geeigneten Ladegerät voll geladen und eventuelle Spannungsdifferenzen zwischen den Zellen ausgeglichen (balanciert) werden.
Lithium-Polymer-Akkumulatoren reagieren bei Überladung wesentlich empfindlicher als andere Akkutypen (bis hin zur Zerstörung durch Brand) und werden dadurch unbrauchbar. Als Maximalspannung wird häufig 4,2 V angegeben, als Minimum 3 V. Aufgrund der Gefahren beim Überladen müssen spezielle Ladegeräte verwendet werden.
Flight Controller
Der Flight Controller (FC) ist die Steuereinheit des Quads. Seine Aufgabe ist es, die RPM von jedem Motor anhand des Inputs des Piloten zu steuern.
Um Berechnungen aufzubessern verwenden die meisten Flight Controller Sensoren. Diese reichen von einfachem Gyroskop zwecks Orientierung bis hin zu Barometer zur automatischen Höhenhaltung. Auch GPS wird für Autopilot-Flug oder Fail-Safe Zwecke verwendet.
Mit dem richtigen Flight Controller Setup sollte das Verhalten des Multicopters exakt dem Input des Piloten entsprechen. Flight Controller sind konfigurierbar und programmierbar und erlauben somit Anpassungen basierend auf persönliche Flugstile.
RC Transmitter
Multicopter können auf verschiedene Wege programmiert und kontrolliert werden. Am gebräuchlichsten ist der RC Transmitter. Dieser Kann über diverse Kanäle unterschiedliche Funktionen steuern, beispielsweise ein Kanal für Vorwärts- sowie Rückwärts Pitching, einer für Rechts- und Links Rolling. Das Minimum zur Steuerung eines Quadcopters sind 4 Kanäle (Pitch, Roll, Throttle, Yaw).
Mehr als vier bzw. fünf Kanäle ermöglichen sogar Einstellungen mittels Schalter und Potentiometer während dem Flug.
Für gewisse Flight Controller werden Transmitter mit mindestens 5 Kanälen empfohlen, damit man zwischen verschiedenen Flugmodi wechseln kann.
Transmitter sind in 2 Modi erhältlich, diese unterscheiden sich in der Belegung des Joysticks:

Beim Mode 1 steuert man das Höhenruder mit dem linken Joystick und den Throttle mit dem rechten.
Beim Mode 2 steuert man das Höhenruder rechts und den Throttle links. Dies ist der gebräuchlichste Modus für Quadcopter, da der Joysticks die Bewegungen des Quadcopters repräsentieren. Der rechte Joystick (das Höhenruder) zentriert auf beide Achsen, während der linke (der Motor Throttle) nur links/rechts automatisch zentriert und in der auf/ab Richtung die eingestellte Position haltet.
Zu einem Transmitter braucht es auch einen Receiver, bei vielen Transmittern ist dieser jedoch dabei. Manche Transmitter sind nur mit ihren eigenen Receivern kompatibel, deshalb sollte man beim Kauf eines separaten Receivers auf die Kompatibilität mit dem Transmitter achten.
Optionale Komponenten
Nach dem man alle notwendigen Teile besorgt hat und man seinen Multicopter erfolgreich zum Fliegen gebracht hat kann man diesen nach Belieben erweitern. Erhältlich sind diverse Komponenten wie z.B. GPS Module, Ultraschallsensoren, Barometer usw, mit welchen man seinen Quadcopter nach Herzenslust aufrüsten kann.
Sehr beliebt ist die Montage von Mini-Kameras, über welche man den Multicopter mittels Video/Audio-Transmitter und LCD Display oder Videobrille aus der FPV-Perspektive (First Person View) steuern kann, so als würde man direkt auf dem Quadcopter mitfliegen. Für uns persönlich bedeutet dies mehr als nur ein einfaches Hardware-Aufrüsten... es erweitert das Fliegen eines Quadcopters um ein Gefühl von welchem der Mensch schon lange träumt - frei wie ein Vogel durch die Lüfte zu fliegen. Auch wenn dieser Vogel weder Federn noch Flügel hat - die passenden Teile sind jedenfalls in unserem Online-Shop erhältlich.











